笔记|生成模型(十一):UIT和DiT架构详解
UIT
论文链接:All are Worth Words: A ViT Backbone for Diffusion Models
官方实现:baofff/U-ViT
扩散模型自从被提出后,主干网络一直都是各种基于卷积的 UNet 的变体。而在其他领域,Transformer 架构则更加流行,尤其是由于 Transformer 多模态性能和缩放能力都很强,因此把 Transformer 架构用于扩散模型是很值得尝试的。这篇 U-ViT 的工作就是一个不错的尝试。
U-ViT 的设计
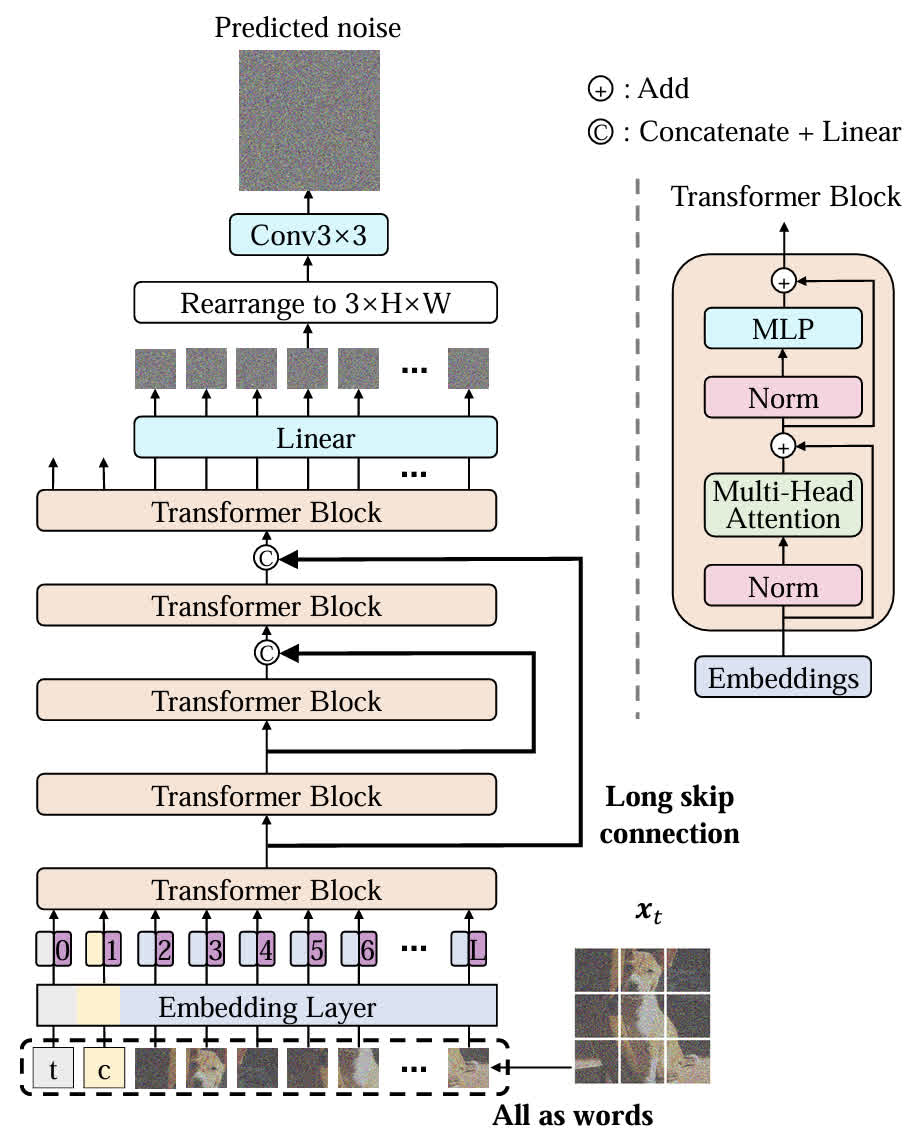
在开始具体的介绍之前,可以先看一下 U-ViT 整体的架构。可以看出其有几个主要的特点:
- 所有的元素,包括 latent、timestep、condition 等都以 token 的形式进行了 embedding;
- 类似于 UNet,在不同的 Transformer Block 层之间添加了长跳跃连接。
虽然理论上来说这两个点都比较简单,但作者进行了一系列实验来选择比较好的设计。
长跳跃连接的实现
将主分支和长跳跃连接分支的特征分别记为 \(h_m\) 和 \(h_s\)。作者选取了几种不同的实现方式进行实验:
- 将两个特征拼接起来然后用一个线性层做 projection:\(\mathrm{Linear}(\mathrm{Concat}(h_m,h_s))\);
- 两者直接相加:\(h_m+h_s\);
- 对长跳跃连接分支做 projection 再相加:\(h_m+\mathrm{Linear}(h_s)\);
- 先相加再做 projection:\(\mathrm{Linear}(h_m+h_s)\);
- 直接去掉长跳跃连接(这个相当于对照组)。
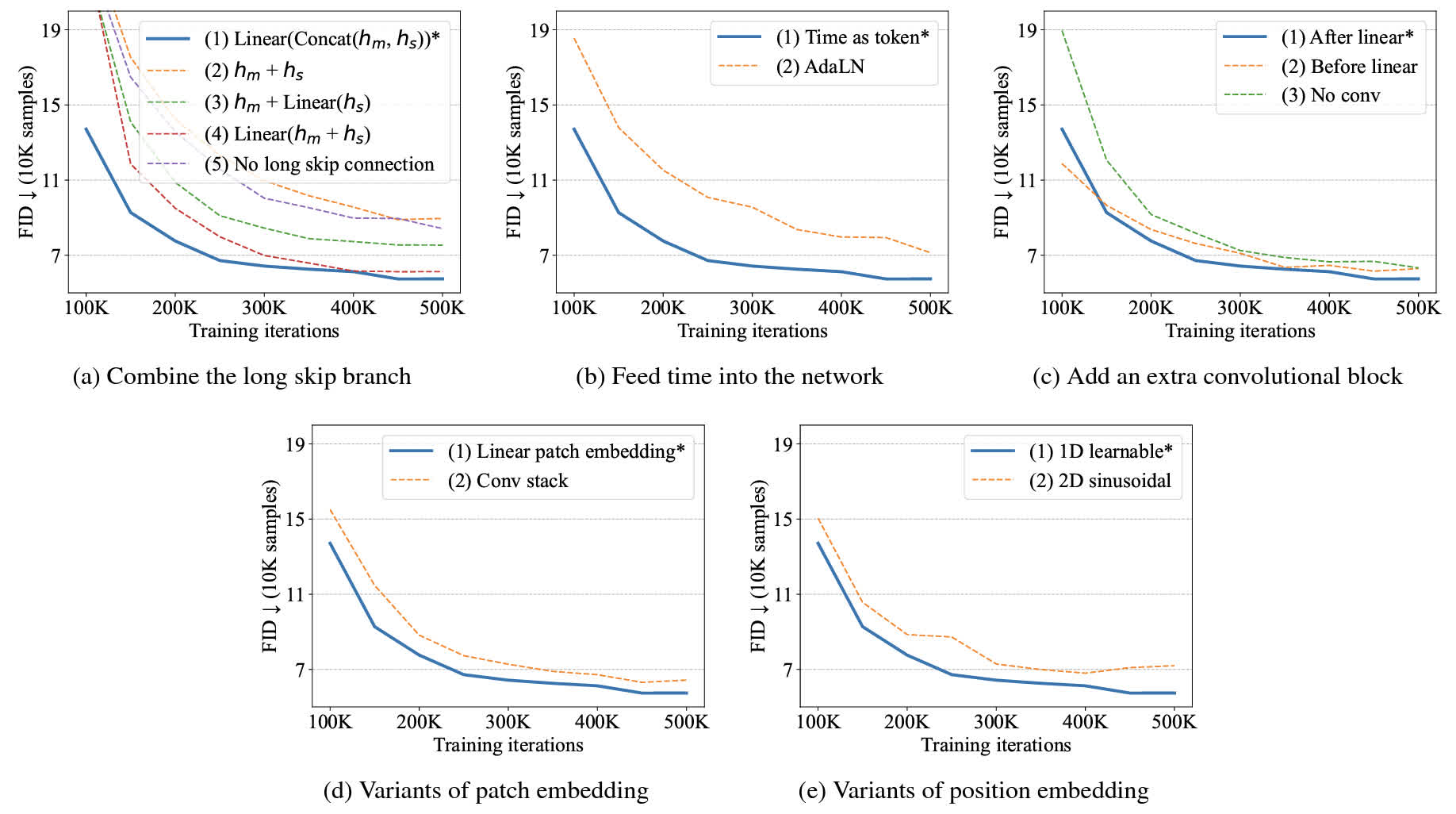
因为 Transformer block 中本来就有短跳跃连接,所以 \(h_m\) 本身就含有一部分 \(h_s\) 的信息,直接将两者相加意义不大。最后经过实验(可以看下方图里的 (a))发现第一种设计的效果最好。
Time Embedding 的实现
时间步的嵌入可以用 ViT 的风格也可以用 UNet 的风格,具体来说是:
- 把 time embedding 当成一个 token 输入;
- 在 transformer block 的 layer normalization 的位置嵌入,也就是使用 AdaLN:\(\mathrm{AdaLN}(h,y)=y_s\mathrm{LayerNorm}(h)+y_b\),其中 \(y_s\) 和 \(y_b\) 是两个 time embedding 的 projection。这个相当于用 time embedding 对 layer normalization 的结果进行 affine。
最后发现第一种方法更佳有效,如下图中的 (b) 所示。
在 Transformer 后使用卷积的方式
作者也尝试了三种方法:
- 直接在 linear projection 后使用 3x3 卷积,把 token 转换为 image patch;
- 在 projection 前先把 token embedding 转换为二维,卷积后再 projection;
- 直接不加入额外的卷积层。
最后发现第一种方式效果最好,如下图中的 (c) 所示。
Patch Embedding 的实现
有两种方法:
- 直接用 linear projection 进行 embedding;
- 用一系列 3x3 卷积+1x1 卷积进行 embedding。
最后发现第一种方法的效果更好,如下图中的 (d)。
Position Embedding 的实现
- 和 ViT 的 setting 相同,使用一维的可学习向量;
- 使用 NLP 领域常用的 sinusoidal position embedding 的二维形式。
经过实验发现前者效果更好,如下图的 (e) 所示。
总而言之作者通过一系列实验确定了一个比较好的 U-ViT 的设计。
讨论:U-ViT 的缩放能力
作者尝试了更深/更宽的模型架构,以及更大的 patch,最后发现性能随着深度和宽度的增加,并不是单调上升的,最佳的效果都在中等宽度/中等深度的网络中取得。
除此之外,作者发现最小的 patch 能够取得最佳的结果,这可能是因为预测噪声是比较 low-level 的任务,所以更小的 patch 更合适。由于对于高分辨率图像使用小 patch 比较消耗资源,所以也需要先将图像转换到低维度的隐空间中再进行建模。
总结
除了 U-ViT 之外,同期的 DiT 也把 transformer 架构引入到了扩散模型中,虽然感觉作者的实验思路非常简单粗暴,但最后的效果还是不错的。从后续的工作也可以看出,这类 transformer 架构的方法在某些任务上(例如视频生成)有取代 UNet 的趋势。
DIT
论文链接:Scalable Diffusion Models with Transformers
官方实现:facebookresearch/DiT
Transformer 在许多领域都有很不错的表现,尤其是近期大语言模型的成功证明了 scaling law 在 NLP 领域的效果。Diffusion Transformer(DiT)把 transformer 架构引入了扩散模型中,并且试图用同样的 scaling 方法提升扩散模型的效果。DiT 提出后就受到了很多后续工作的 follow,例如比较有名的视频生成方法 sora 就采取了 DiT 作为扩散模型的架构。
Diffusion Transformer
在正式开始介绍 DiT 之前,需要先了解一下 DiT 使用的扩散模型架构。DiT 使用的是 latent diffusion,VAE 采用和 Stable Diffusion 相同的 KL-f8,并且使用了 Improved DDPM(详细介绍见这个链接),同时预测噪声的均值和方差。
Patchify
由于 DiT 使用了 latent diffusion,对于 \(256\times256\times3\) 的输入图像,首先使用 VAE 转换为 \(32\times32\times4\) 的 latent,在 latent 输入到 DiT 之前,首先需要将其转换为 token,也就是 patchify。DiT 的 patchify 方式和 ViT 基本上相同,也就是将图像变成 \((I/p)^2\) 个 patch,其中 \(I\) 是 latent 的 spatial size,\(p\) 是每个 patch 的大小,这里 \(p\) 的取值使用了 2、4、8 几个取值。在转换为 patch 后,还需要给每个 patch 加上位置编码,这里的位置编码使用的是二维的不可学习 sin-cos 位置编码。
DiT Block Design
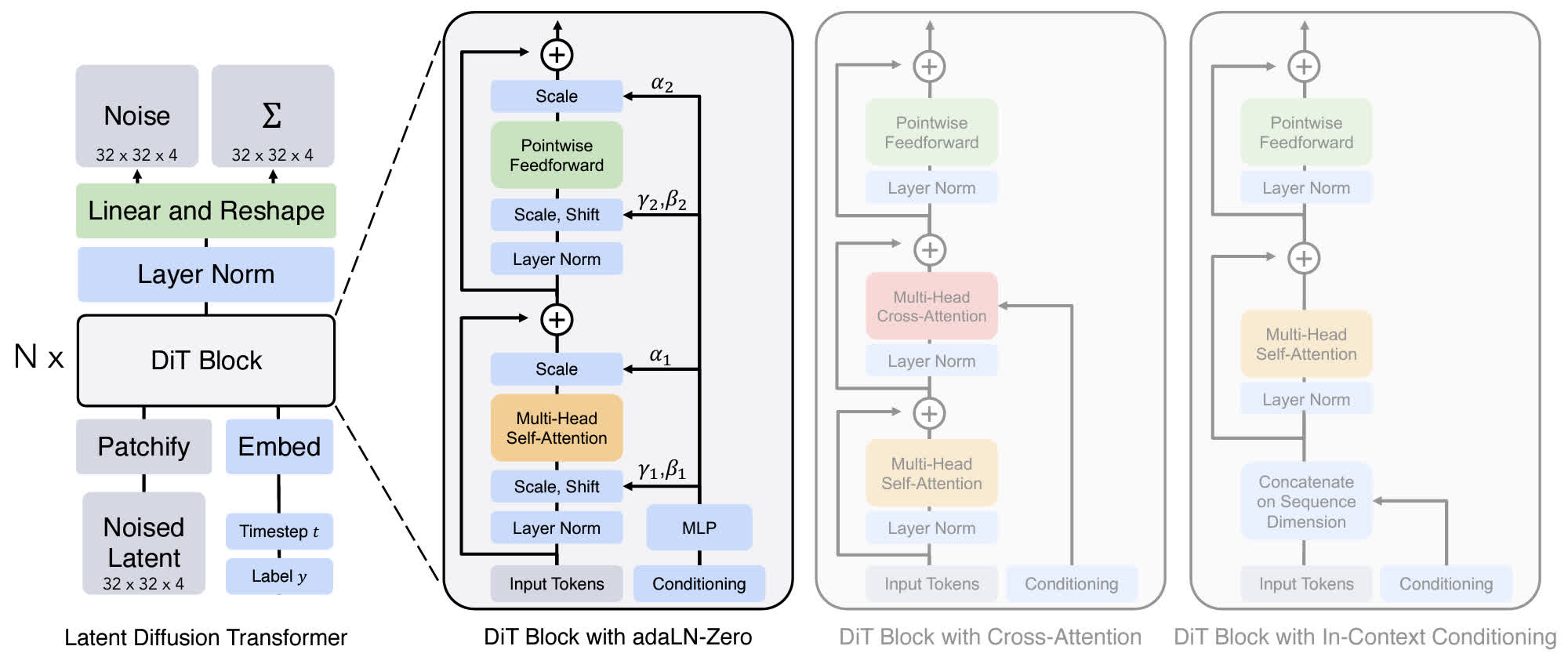
DiT 的 block 大部分结构都可以直接沿用 ViT 的结构,不过和 ViT 不同的是,DiT 除了需要接收 token 的输入,还需要将 time embedding 和生成条件也进行嵌入。为此,作者设计了四种方式:
- In context conditioning:用类似 ViT 的方法,把 time embedding 和 condition 作为额外的 token 输入到 DiT 中,并且在最后把这两部分 token 去掉。这个做法和 U-ViT 是一样的,不过会增加一部分额外的计算开销;
- Cross-attention block:使用和原版 Transformer 类似的设计,在 self-attention 层后方再加一个 cross-attention 层,把 time embedding 和 condition 作为一个长度为 2 的序列输入,latent 作为 query,条件作为 key 和 value,这种方式引入的额外开销比较大;
- Adaptive layer norm:将 transformer block 中的 LayerNorm 换成 AdaLayerNorm,用 time embedding 和 condition embedding 回归 shift 和 scale 参数,用来对 latent 进行 affine;
- AdaLN-Zero block:根据一些现有的工作的经验,把残差连接前的最后一个卷积初始化为 0 对训练比较有利,因此这里将 AdaLN 中的线性层(对应上图中的 \(\gamma\) 和 \(\beta\))进行 0 初始化,并且在最后加入另一个可学习的 scale(对应上图的 \(\alpha\)),也初始化为 0。
经过实验发现 AdaLN-Zero 的设计是最好的,因此 DiT 最终采用的是这种设计方案。
其他
和 ViT 相同,通过修改 transformer block 的数量、隐变量的维度,以及 attention head 的数量,可以得到不同大小的 DiT(DiT-S、DiT-B、DiT-L 和 DiT-XL),这些模型的 flop 从 0.3 GFLOPs 到 118.6 GFLOPs 不等。
对于 decoder,DiT 使用一个 LayerNorm(或 AdaLN)以及一个线性层对输出进行编码。最后得到的输出的大小为 \(p\times p\times 2C\),通道数为 \(2C\) 是因为包括了均值和方差。
讨论
作者进行了一系列实验来研究不同 DiT 设计之间的区别,主要包括以下几个方面:
- DiT block 的设计:经过实验可以发现 AdaLN 的效果比其他的条件嵌入方式更好,并且初始化方式也很重要,AdaLN 将每个 DiT block 初始化为恒等映射,能取得更好的效果;不过对于比较复杂的条件,比如 text,可能用 cross-attention 更好;
- 缩放模型大小和 patch 大小:实验发现增大模型大小并减小 patch 大小可以提高性能;
- 提高 GFLOPs 是改善模型性能的关键;
- 更大的 DiT 模型的计算效率更高;
DiT 的代码实现
主要需要关注的是模型的 DiT block 和 decoder,根据官方实现:
1 | def modulate(x, shift, scale): |
可以看到所有的 affine 参数都是由同一个 MLP 学习的,推理时被 6 等分,然后对 latent 进行 affine。
Decoder 则是由 AdaLN + Linear 组成:
1 | class FinalLayer(nn.Module): |
这些 adaLN_modulation 层在创建时被零初始化:
1 | # 零初始化 DiT 块中的 adaLN 调制层: |
adaLN 调制层零初始化的作用:
1 | # 当权重和偏置都为0时: |
总结
个人感觉 DiT 相比于 U-ViT 是更成功的,因为我们使用 transformer 架构比较注重的就是缩放能力,而 DiT 的实验表明,其性能能够随着模型的缩放(模型规模/模型计算量)而受益。
转载: