笔记|生成模型(十三):Flow Matching理论与实现
在 Stable Diffusion 3 中,模型是通过 Flow Matching 的方法训练的。从这个方法的名字来看,就知道它和 Flow-based Model 有比较强的关联,因此在正式开始介绍这个方法之前先交代一些 Flow-based Model 相关的背景知识。
Flow-based Models
Normalizing Flow
Normalizing Flow 是一种基于变换对概率分布进行建模的模型,其通过一系列离散且可逆的变换实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow 训练完成后,就可以直接从高斯分布中进行采样,并通过逆变换得到原始分布中的样本,实现生成的过程。
从这个角度看,Normalizing Flow 和 Diffusion Model 是有一些相通的,其做法的对比如下表所示。从表中可以看到,两者大致的过程是非常类似的,尽管依然有些地方不一样,但这两者应该可以通过一定的方法得到一个比较统一的表示。
| 模型 | 前向过程 | 反向过程 |
|---|---|---|
| Normalizing Flow | 通过显式的可学习变换将样本分布变换为标准高斯分布 | 从标准高斯分布采样,并通过上述变换的逆变换得到生成的样本 |
| Diffusion Model | 通过不可学习的 schedule 对样本进行加噪,多次加噪变换为标准高斯分布 | 从标准高斯分布采样,通过模型隐式地学习反向过程的噪声,去噪得到生成样本 |
Continuous Normalizing Flow
Continuous Normalizing Flow(CNF),也就是连续标准化流,可以看作 Normalizing Flow 的一般形式。CNF 将原本 Normalizing Flow 中离散的变换替换为连续的变换,并用常微分方程(ODE)来表示,可以写成以下的形式: \[ \frac{\mathrm{d}\mathbf{z}_t}{\mathrm{d}t}=v(\mathbf{z}_t,t) \] 其中 \(t\in[0,1]\),\(\mathbf{z}_t\) 可以看作时间 \(t\) 下的数据点,\(v(\mathbf{z}_t,t)\) 是一个向量场,定义了数据点在每个时间下的变化大小与方向,这个向量场通常由神经网络来学习。当这个向量场完成了学习后,就可以用迭代法来求解: \[ \mathbf{z}_{t+\Delta t}=\mathbf{z}_t+\Delta t\cdot v(\mathbf{z}_t,t) \] 也就是说,一旦我们得知从标准高斯分布到目标分布的变换向量场,就可以从标准高斯分布采样,然后通过上述迭代过程得到目标分布中的一个近似解,完成生成的过程。这和离散的 Normalizing Flow 是一致的。
在 Normalizing Flow 中存在 Change of Variable Theory,这个定理是用来保证概率分布在进行变化时,概率密度在全体分布上的积分始终为 1 的一个式子,其形式为: \[ p(\mathbf{x})=\pi(\mathbf{z})\left|\mathrm{det}\ \frac{\mathrm{d}\mathbf{z}}{\mathrm{d}\mathbf{x}}\right|=\pi(\mathbf{f}^{-1}(\mathbf{x}))\left|\mathrm{det}\ \mathbf{J}(\mathbf{f}^{-1}(\mathbf{x}))\right| \] 在 Flow Matching 的论文中,也给出了形式类似的公式,称为 push-forward equation,定义为: \[ p_t=[\phi_t]_*p_0 \] 其中的 push-forward 运算符,也就是星号,定义为: \[ [\phi_t]_*p_0(x)=p_0(\phi_t^{-1}(x))\mathrm{det}\left[\frac{\partial\phi_t^{-1}}{\partial x}(x)\right] \] 可以看出形式也是类似的。
Flow Matching
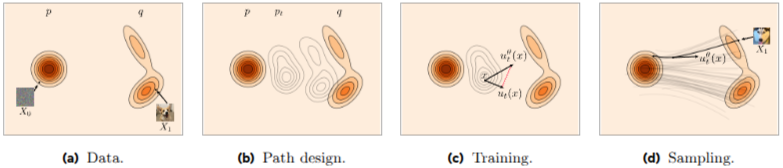
图像生成任务的核心在于建模样本如何从简单的先验分布(如标准高斯分布 \(\mathcal{N}(0, \mathbf{I})\))转换到复杂的数据分布 \(p_{\text{data}}(x)\)。与基于去噪的扩散模型通过学习逐步去噪过程不同,Flow Matching 直接建模样本在两个分布之间的连续时间传输过程。从数学角度来看,Flow Matching 学习一个时间相关的向量场 \(v_t(x)\),该向量场定义了从先验分布 \(p_0\) 到目标分布 \(p_1\) 的概率路径 \(\{p_t\}_{t \in [0,1]}\)。这种方法将图像生成问题转化为最优传输问题:如何找到一个连续的概率流,使得 \(p_0 = \mathcal{N}(0, \mathbf{I})\) 和 \(p_1 = p_{\text{data}}(x)\)。因此,Flow Matching 的核心思想是在已知源分布 \(p_0\) 和目标分布 \(p_1\) 之间构造一条时间参数化的概率路径 \(\{p_t\}_{t \in [0,1]}\),并学习生成该概率路径的速度场 \(v_t(x)\)。
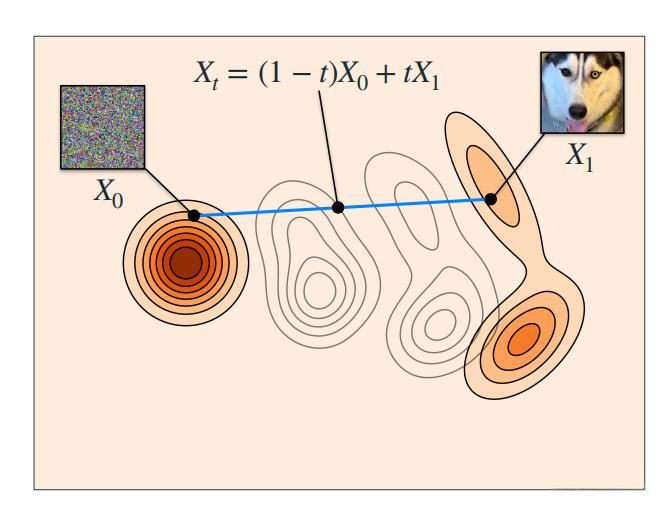
下图展示了 Flow Matching 中关键变量的定义:\(x_0\) 表示初始噪声,\(x_1\) 表示目标数据,\(x_t\) 表示时间 \(t\) 处的中间状态。 \(x_t = (1-t)x_0 + tx_1 = x_0 + t(x_1-x_0)\),其中t一般定义为采样时间步的方差,在代码中一般用sigma表示,sigma的范围是从0到1。(一般用采样时间步的归一化表示)。\(x_0 + t(x_1-x_0)\)可以理解成从\(x_0\)的起点开始,朝着\(x_{0->1}\)的方向步进了t的长度。
具体的实现步骤包括:
建模过程首先从每个分布中采样一个点,然后用路径连接它们。最常用的连接方式是直线路径:\(x(t) = (1-t)x_0 + tx_1\)。这种线性插值方法在\(x_0\)和\(x_1\)之间建立了最直接的连接路径。虽然也可以使用其他插值方法如球面插值,但线性插值因其简单性和良好的实际效果而被广泛采用。
目标是学习一个时间相关的速度场\(v(x,t)\),该速度场描述轨迹上每个点的瞬时速度。由于我们已经从路径定义中知道了真实速度,神经网络的任务是近似\(v(x,t) = x_1 - x_0\)。
训练过程就是使模型的预测速度与真实速度匹配。
\[\mathcal{L} = \mathbb{E}_{x_0,x_1,t}\left[\left\|f_\theta(x(t),t) - \frac{d}{dt}x(t)\right\|^2\right]\]
• \(x(t) = (1-t)x_0 + tx_1\): 噪声和数据的插值点
• \(f_\theta(x(t),t)\): 神经网络预测的速度
• \(\frac{d}{dt}x(t) = x_1 - x_0\): 真实速度
• \(\mathbb{E}_{x_0,x_1,t}\): 随机噪声/数据对和插值时间的期望
开源代码参考: 在实际的 PyTorch 实现中(例如 Stable Diffusion 3 或 Flux 的训练代码),Flow Matching 的 Loss 计算极其简单直观:
1 | # x_1: 真实图片 (目标) |
Flow Matching采样过程
在训练阶段,网络学习了将点从噪声移动到数据的速度场\(v(x,t)\)。训练结束后同时访问\(x_0\)和\(x_1\),但在生成阶段只有\(x_0\)。采样的目标是取一个噪声点并将其推进到\(p_1\)分布,最终获得类似自然图像的结果。
采样过程从样本\(x_0 \sim p_0\)(例如标准高斯噪声)开始,然后定义从\(t = 0\)到\(t = 1\)的时间网格,将其均分割成一系列步骤。在每个时间步,我们向前求解ODE来更新样本,采样过程一般使用欧拉积分进行迭代,欧拉积分是一阶离散的近似数值积分,为了更加精确,也会有人使用4阶龙格库塔积分进行更精细的数值积分。
\[x_{t+\Delta t} = x_t + \Delta t \cdot f_\theta(x_t, t)\]
• \(x_t\): 时间 \(t\) 处的当前样本
• \(\Delta t\): 步长(例如对于 \(N\) 步采样,\(\Delta t = \frac{1}{N}\))
• \(f_\theta(x_t, t)\): 学习到的速度场——指示在此时间点如何更新样本
• \(x_{t+\Delta t}\): 使用预测速度前进一步后轨迹上的下一个样本
速度场\(v(x,t)\)在每个步骤中与当前的\(x\)和\(t\)一起使用,以获得\(v(t)\)的估计。一旦到达\(t = 1\),就得到了一个完整看起来像自然图像的样本。这个过程类似于跟随流场,我们沿着学习的速度路径将样本"推向"数据方向。
上述的不管是欧拉数值积分,还是龙格库塔积分,他们都是一种确定性积分,所以是一条确定性路径。最终的生成样本的随机性只来源于0时刻的随机采样的高斯白噪声。 所以SD3的实现中给出了另一种形式,即随机路径。通过估计与终点图像配对的起点噪声,构建新的随机噪声作为方向向前随机步进一步(详细见推导代码实现)。
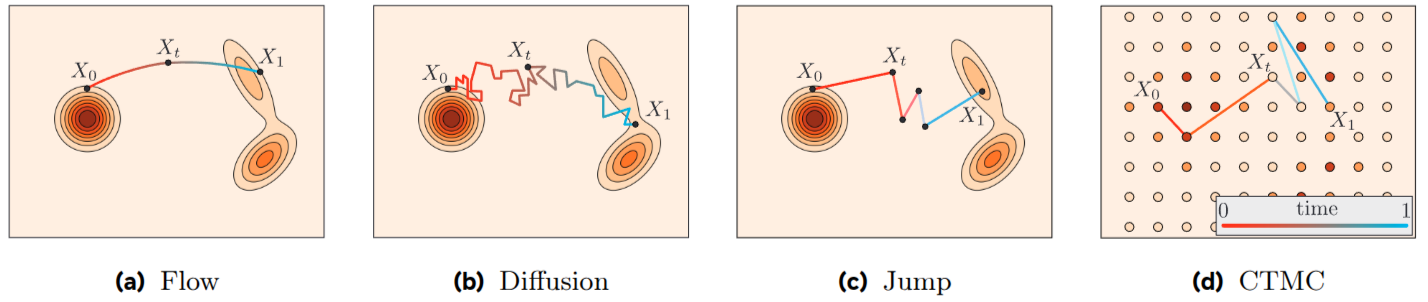
最后,在这里我们直观的展现出Flow Matching和其他方法在不同分布寻找路径的区别,四种时间连续过程 \((x_t)_{0≤t≤1}\),将源样本 \(x_0\) 传输到目标样本 \(x_1\)。这些过程分别是连续状态空间中的流、连续状态空间中的扩散、连续状态空间中的跳跃过程(密度用等高线可视化),以及离散状态空间中的跳跃过程(状态用圆盘表示,概率用颜色可视化)。
代码
时间步调度器初始化
Flow Matching的时间步调度器控制采样过程中的时间分布。通过非线性映射可以调整采样密度,让模型在关键区域有更密集的采样。
1 | # 时间步初始化 |
shift参数通过公式 \(\sigma' = \frac{\text{shift} \cdot \sigma}{1 + (\text{shift} - 1) \cdot \sigma}\) 对时间轴进行非线性变换。当shift > 1时,采样会偏向早期时间步;当shift < 1时,采样会偏向后期时间步。
时间步采样策略
训练时需要为每个batch采样不同的时间步,提供了三种采样策略:
1 | def compute_density_for_timestep_sampling( |
- logit_normal: 通过sigmoid函数将正态分布映射到[0,1]区间,可以控制采样集中在特定时间段
- mode: 使用余弦变换 \(u' = 1 - u - \text{mode_scale} \cdot (\cos^2(\frac{\pi u}{2}) - 1 + u)\) 创建偏向特定模式的分布
- uniform: 标准均匀分布
训练循环核心
Flow Matching的训练目标是学习速度场 \(v_t(x_t)\),使得模型能够预测从噪声到数据的最优传输路径。
1 | # 训练步骤 |
Flow Matching前向过程
根据线性插值公式 \(x_t = (1-\sigma_t)x_1 + \sigma_t x_0\) 构造噪声样本,其中 \(x_0\) 是噪声,\(x_1\) 是数据:
1 | # 构造噪声样本 |
速度场的真实值为 \(v_t = x_0 - x_1 = \text{noise} - \text{data}\),模型通过最小化预测速度场与真实速度场的MSE损失来学习。
推理过程
推理时从纯噪声开始,通过求解ODE逐步生成图像:
1 | # 初始化 |
调度器步进函数
调度器的step函数实现了两种采样模式:
1 | def step(self, model_output, timestep, sample, return_dict=True): |
确定性采样使用欧拉方法求解ODE:\(x_{t+\Delta t} = x_t + \Delta t \cdot v_t(x_t)\)
随机采样通过以下步骤引入随机性:
- 估计起点噪声:\(x_0 = x_t - \sigma_t \cdot v_t\)
- 生成新的随机噪声
- 从新路径采样:\(x_{t+\Delta t} = (1-\sigma_{t+\Delta t})x_0 + \sigma_{t+\Delta t}\cdot\text{noise}\)
这种设计让Flow Matching既可以确定性生成(保证质量),也可以随机生成(增加多样性)。
参考资料:
总结与算法对比
算法对比:Flow Matching vs DDPM
- 路径:DDPM 的加噪路径是弯曲且充满随机性的(马尔可夫链),而 Flow Matching(特别是 Rectified Flow)的路径是两点之间的直线。
- 速度:因为直线路径更平滑,ODE 求解器可以用更大的步长(更少的步数)进行采样,这使得 Flow Matching 的生成速度远快于传统的 DDPM。
- 实现:Flow Matching 的 Loss 计算极其简单(预测速度与真实速度的 MSE),不需要像 DDPM 那样推导复杂的变分下界(ELBO)和各时间步的权重。
开源代码参考: 目前最前沿的开源图像大模型,如
Stable Diffusion 3 和
Flux,都已经全面抛弃了 DDPM,转而采用 Flow
Matching(Rectified Flow)作为其核心的生成机制。你可以在
diffusers 库的 FlowMatchEulerDiscreteScheduler
中看到其采样过程的实现。