笔记|强化学习(一):强化学习基础与策略梯度
本文为大模型对齐与强化学习系列的第一篇,主要回顾强化学习(RL)的基础概念,并严格推导策略梯度定理,为后续深入理解 REINFORCE、Actor-Critic、PPO 和 GRPO 打下坚实的理论基础。
⬅️ 上一篇:笔记|生成模型(十五):Flux 架构解析
强化学习基础概念:从"训狗"说起
对于纯小白读者来说,理解强化学习(Reinforcement Learning, RL)最直观的例子就是"训狗"。
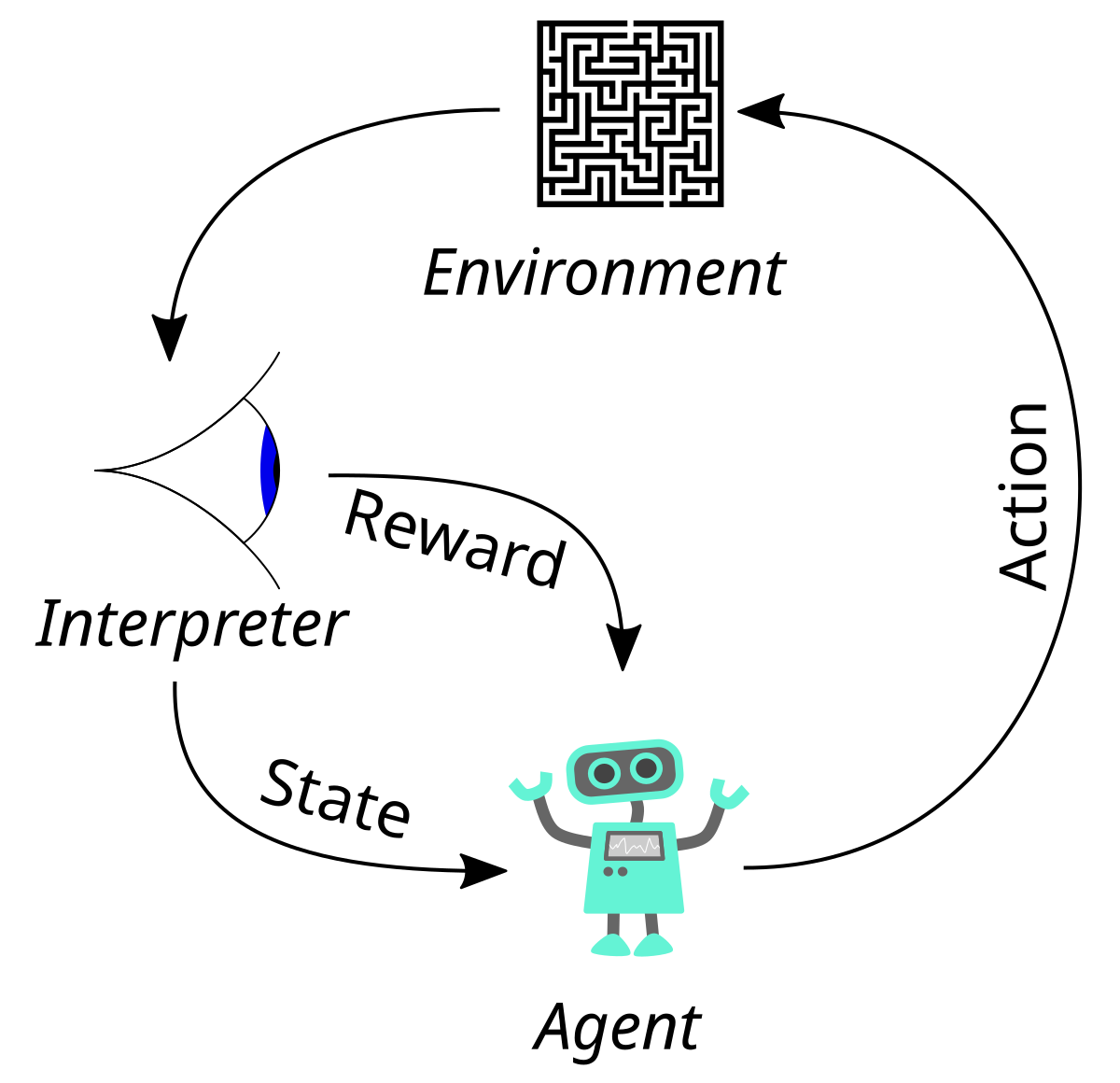
- 智能体(Agent):就是那只狗(在 AI 中就是我们的模型)。
- 环境(Environment):狗所处的现实世界。
- 状态(State):狗当前看到的画面、听到的口令(比如你喊"坐下")。
- 动作(Action):狗做出的反应(比如坐下、趴下、或者跑开)。
- 奖励(Reward):如果狗做对了,你给它一块肉(正奖励);做错了,你呵斥它(负奖励或零奖励)。
强化学习的核心目标,就是让这只狗(模型)在不断的"尝试-犯错-获得奖励"的过程中,自己摸索出一条规律:在什么情况下,做什么动作,能吃到最多的肉。这条规律,在数学上就叫做策略(Policy)。
马尔可夫决策过程 (MDP)
强化学习问题通常被建模为马尔可夫决策过程(Markov Decision Process, MDP)(参考 CMU 15-281 Lecture Notes: MDPs)。一个 MDP 可以用一个元组 \(\langle \mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma \rangle\) 来表示:
- \(\mathcal{S}\):状态空间(State Space),包含所有可能的状态 \(s\)。
- \(\mathcal{A}\):动作空间(Action Space),包含所有可能的动作 \(a\)。
- \(\mathcal{P}\):状态转移概率(Transition Probability),\(\mathcal{P}(s'|s, a)\) 表示在状态 \(s\) 执行动作 \(a\) 后转移到状态 \(s'\) 的概率。
- \(\mathcal{R}\):奖励函数(Reward Function),\(\mathcal{R}(s, a)\) 表示在状态 \(s\) 执行动作 \(a\) 后获得的即时奖励。
- \(\gamma\):折扣因子(Discount Factor),\(\gamma \in [0, 1]\),用于权衡即时奖励与未来奖励的重要性。
智能体的目标是学习一个策略 \(\pi(a|s)\),即在状态 \(s\) 下选择动作 \(a\) 的概率分布,使得期望的累积折扣奖励(Return)最大化: \[ J(\pi) = \mathbb{E}_{\tau \sim \pi} \left[ \sum_{t=0}^{\infty} \gamma^t r_t \right] \] 其中,\(\tau = (s_0, a_0, r_0, s_1, a_1, r_1, \dots)\) 表示一条完整的交互轨迹(Trajectory)。
价值函数与优势函数:怎么判断一个动作是好是坏?
在训狗的过程中,狗不仅要看眼前的肉,还要考虑长远的利益(比如现在乖乖坐下,等会儿可能有大骨头)。为了评估策略的好坏,我们引入两个重要的价值函数:
- 状态价值函数(State-Value Function) \(V^\pi(s)\):表示在状态 \(s\) 下,遵循策略 \(\pi\) 所能获得的期望累积奖励。它实际上是该状态下所有可能动作的动作价值 \(Q^\pi(s, a)\) 按照策略概率 \(\pi(a|s)\) 的加权平均: \[ V^\pi(s) = \mathbb{E}_{\pi} \left[ \sum_{k=0}^{\infty} \gamma^k r_{t+k} \Big| s_t = s \right] = \sum_{a} \pi(a|s) Q^\pi(s, a) \]
- 动作价值函数(Action-Value Function) \(Q^\pi(s, a)\):表示在状态 \(s\) 下执行动作 \(a\),随后遵循策略 \(\pi\) 所能获得的期望累积奖励。 \[ Q^\pi(s, a) = \mathbb{E}_{\pi} \left[ \sum_{k=0}^{\infty} \gamma^k r_{t+k} \Big| s_t = s, a_t = a \right] \]
优势函数(Advantage Function) \(A^\pi(s, a)\) 定义为动作价值与状态价值之差,用于衡量在状态 \(s\) 下执行特定动作 \(a\) 相比于"让策略自己盲选动作的平均表现"(即 \(V^\pi(s)\))的"优势"程度: \[ A^\pi(s, a) = Q^\pi(s, a) - V^\pi(s) \] 如果 \(A^\pi(s, a) > 0\),说明动作 \(a\) 比策略 \(\pi\) 随机选出来的平均动作表现更好;反之则说明动作 \(a\) 不如策略的平均水平。这里并不是指"执行动作"与"不执行动作"的对比,而是"执行特定动作 \(a\)"与"按策略概率分布执行动作"的对比。
策略梯度定理:如何让模型"变聪明"?
核心思考出发点:既然我们知道了什么是"好动作"(优势函数 \(A > 0\)),什么是"坏动作"(优势函数 \(A < 0\)),那我们该如何修改模型(神经网络)的参数,让它以后多做"好动作",少做"坏动作"呢?
这就是策略梯度(Policy Gradient)的意义所在。它提供了一种数学上的指导,告诉模型参数应该往哪个方向调整。
在深度强化学习中,我们通常使用神经网络来参数化策略,记为 \(\pi_\theta(a|s)\),其中 \(\theta\) 是网络参数。我们的目标是找到最优参数 \(\theta^*\),使得目标函数 \(J(\theta)\) 最大化。这里的目标函数 \(J(\theta)\) 通常定义为策略 \(\pi_\theta\) 下的期望累积奖励(即初始状态的价值): \[ J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{\infty} \gamma^t r_t \right] = V^{\pi_\theta}(s_0) \]
深入理解目标函数 \(J(\theta)\)
很多人可能会有疑问:既然 \(J(\theta) = V^{\pi_\theta}(s_0)\),那训练的目标难道是"让所有动作的价值都变大"吗?为了理清这个问题,我们需要深入理解以下三点:
"初始状态的价值" \(V^{\pi_\theta}(s_0)\) 的真正含义: 在强化学习中,一个状态的"价值"就是指从这个状态出发,按照策略一直执行下去,所能获得的"期望累积奖励"。所以,目标函数 \(J(\theta)\) 正是从初始状态 \(s_0\) 开始,遵循策略 \(\pi_\theta\) 所能获得的期望总奖励。
\(J(\theta)\) 是期望值,不是单条轨迹的回报: 上面公式中的 \(\mathbb{E}_{\tau \sim \pi_\theta}[\sum \gamma^t r_t]\) 不是"某一条轨迹的累积奖励"——那个是 \(R(\tau) = \sum \gamma^t r_t\),它会因为采样的随机性而每次不同。前面的 \(\mathbb{E}\)(期望)意味着:对所有可能轨迹的回报取加权平均。每次从 \(s_0\) 出发,策略的随机采样和环境的随机转移会产生不同的轨迹,\(J(\theta)\) 是这些无穷多条可能轨迹回报的平均值。
等价展开:按第一步动作分组(全概率公式): 这个"对所有轨迹取平均"的期望,可以按第一步选择的动作来分组展开。对于初始状态 \(s_0\): \[ J(\theta) = V^{\pi_\theta}(s_0) = \sum_{a} \pi_\theta(a|s_0) Q^{\pi_\theta}(s_0, a) \] 这个公式和上面的期望公式是完全等价的,只是换了一种展开方式:把所有可能的轨迹按"第一步选了哪个动作"分成若干组,每组轨迹的平均回报恰好是 \(Q^{\pi_\theta}(s_0, a)\),每组出现的概率是 \(\pi_\theta(a|s_0)\)——各组概率乘以各组平均再求和,就是全概率公式。
虽然公式只对 \(s_0\) 下的第一步动作求和,但 \(Q^{\pi_\theta}(s_0, a)\) 已经包含了"执行动作 \(a\) 之后,沿整条轨迹遵循策略 \(\pi_\theta\) 所能获得的全部未来奖励的期望"——\(Q\) 值把未来"打包"进去了。
举个直观的例子: 假设在某个状态下只有两个动作:
- 动作 A 是"吃金币",环境给的真实价值 \(Q(s, A) = 10\)。
- 动作 B 是"跳悬崖",环境给的真实价值 \(Q(s, B) = -10\)。
动作本身的价值是由环境规则决定的,我们无法改变 \(Q\) 值本身。 但我们可以改变神经网络的参数 \(\theta\),从而改变策略输出的概率(权重):
- 训练前(瞎猜):策略可能各给 50% 的概率,此时 \(J = 0.5 \times 10 + 0.5 \times (-10) = 0\)。
- 训练后(变聪明):策略学会了 99% 选 A,1% 选 B,此时 \(J = 0.99 \times 10 + 0.01 \times (-10) = 9.8\)。
结论: 强化学习的训练目标,不是去放大动作本身的价值,而是通过调整网络参数 \(\theta\),把高价值动作的"选择概率"调大,把低价值动作的"选择概率"调小,从而让这个加权平均值 \(J(\theta)\) 达到最大。
为了使用梯度上升法更新参数:\(\theta \leftarrow \theta + \alpha \nabla_\theta J(\theta)\),我们需要计算目标函数的梯度 \(\nabla_\theta J(\theta)\)。
但这里面临一个根本性困难:\(J(\theta)\) 是一个期望值——它取决于策略 \(\pi_\theta\) 生成的轨迹分布,而轨迹中涉及随机采样和环境交互,无法直接对 \(\theta\) 求导。策略梯度定理(Policy Gradient Theorem) 正是为了解决这个问题而诞生的:它给出了一个不需要对环境求导、可以通过采样近似的梯度表达式。换句话说,即使环境是一个完全不可微的黑盒(物理引擎、游戏模拟器、大模型评分器),我们依然能精确计算策略梯度的方向。
根据策略梯度定理,梯度的解析表达式为: \[ \nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{\infty} \gamma^t \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot Q^{\pi_\theta}(s_t, a_t) \right] \]
一句话直觉:用当前策略跑很多局,对于轨迹上每一步——如果这步的动作后来拿了高分(\(Q\) 大),就调整参数让这个动作下次更可能被选到;如果拿了低分(\(Q\) 小甚至为负),就让这个动作下次更不可能被选到。所有时间步的这些「推力」加在一起、取平均,就是让总回报上升最快的参数更新方向。
推导的核心:对数导数技巧 (Log-Derivative Trick)
上面的公式中出现了 \(\nabla_\theta \log \pi_\theta\)——为什么对概率分布求梯度会变成对 \(\log\) 概率求梯度?(注:本文及后续强化学习相关文章中,\(\log\) 均指代以 \(e\) 为底的自然对数 \(\ln\))下面的推导将严格证明这个结论,其核心贡献有三点:(1) 把"对轨迹概率分布求导"转化为"对 \(\log\) 概率求期望",从而可以通过蒙特卡洛采样近似;(2) 证明环境的状态转移概率 \(P(s'|s,a)\) 对 \(\theta\) 的梯度为零,因此完全不需要知道环境的内部规则——这为后面 REINFORCE 的代理损失(Surrogate Loss)设计提供了数学保证;(3) 引入因果性裁剪,降低梯度估计的方差。
我们从目标函数 \(J(\theta)\) 的期望定义出发。根据前面的定义,目标函数是整条轨迹累积奖励的期望: \[ J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{\infty} \gamma^t r_t \right] \] 为了书写简洁,我们记轨迹 \(\tau = (s_0, a_0, s_1, a_1, \dots)\) 的总累积奖励为 \(R(\tau) = \sum_{t=0}^{\infty} \gamma^t r_t\)。 由于期望的本质是对所有可能轨迹的概率加权求和(积分),且参数 \(\theta\) 决定了轨迹出现的概率分布 \(P(\tau|\theta)\),所以我们必须将期望展开为积分形式才能对 \(\theta\) 求导:
\[ \begin{aligned} \nabla_\theta J(\theta) &= \nabla_\theta \mathbb{E}_{\tau \sim \pi_\theta} [R(\tau)] \\ &= \nabla_\theta \int P(\tau|\theta) R(\tau) d\tau \\ &= \int \nabla_\theta P(\tau|\theta) R(\tau) d\tau \end{aligned} \]
此时,我们引入微积分中的链式法则 \(\nabla f(x) = f(x) \nabla \log f(x)\)(即对数导数技巧),将其应用于概率 \(P(\tau|\theta)\): \[ \begin{aligned} \nabla_\theta J(\theta) &= \int P(\tau|\theta) \nabla_\theta \log P(\tau|\theta) R(\tau) d\tau \\ &= \mathbb{E}_{\tau \sim \pi_\theta} \left[ \nabla_\theta \log P(\tau|\theta) R(\tau) \right] \end{aligned} \]
接下来,我们需要计算 \(\nabla_\theta \log P(\tau|\theta)\)。根据马尔可夫决策过程,一条轨迹发生的概率可以分解为初始状态概率、策略选择概率和环境转移概率的乘积: \[ P(\tau|\theta) = P(s_0) \prod_{t=0}^{\infty} \pi_\theta(a_t|s_t) P(s_{t+1}|s_t, a_t) \] 对其两边取对数(\(\log\) 将乘积变为求和): \[ \log P(\tau|\theta) = \log P(s_0) + \sum_{t=0}^{\infty} \log \pi_\theta(a_t|s_t) + \sum_{t=0}^{\infty} \log P(s_{t+1}|s_t, a_t) \] 对参数 \(\theta\) 求梯度时,由于环境的初始状态分布 \(P(s_0)\) 和状态转移概率 \(P(s_{t+1}|s_t, a_t)\) 都与我们的策略网络参数 \(\theta\) 无关,它们的梯度为 0,直接消失: \[ \nabla_\theta \log P(\tau|\theta) = \sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta(a_t|s_t) \]
将展开后的梯度代回期望公式,我们得到: \[ \nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \left( \sum_{t=0}^{\infty} \nabla_\theta \log \pi_\theta(a_t|s_t) \right) R(\tau) \right] \]
最后一步,结合因果性(Causality):未来的动作不能影响过去的奖励。即 \(t\) 时刻的动作 \(a_t\) 只能影响 \(t\) 时刻及之后的累积奖励。因此,我们可以将总奖励 \(R(\tau)\) 替换为从 \(t\) 时刻开始的累积奖励(这正是动作价值 \(Q^{\pi_\theta}(s_t, a_t)\) 的无偏估计),最终得到策略梯度定理的严谨表达式: \[ \nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{\infty} \gamma^t \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot Q^{\pi_\theta}(s_t, a_t) \right] \]
逐项拆解这个公式:
| 组成部分 | 写法 | 含义 |
|---|---|---|
| 外层期望 | \(\mathbb{E}_{\tau \sim \pi_\theta}[\cdots]\) | 用当前策略 \(\pi_\theta\) 跑很多条轨迹,对括号内的量取平均 |
| 时间求和 | \(\sum_{t=0}^{\infty}\) | 对轨迹上每个时间步 \(t\) 的贡献求和 |
| 折扣因子 | \(\gamma^t\)(\(\gamma \in [0,1)\)) | 越远的未来贡献越小,\(\gamma=0.99\) 表示 100 步后衰减到约 \(\frac{1}{3}\) |
| 策略梯度方向 | \(\nabla_\theta \log \pi_\theta(a_t \mid s_t)\) | "让动作 \(a_t\) 在状态 \(s_t\) 下更可能"的参数更新方向 |
| 信用分配权重 | \(Q^{\pi_\theta}(s_t, a_t)\) | 在状态 \(s_t\) 下执行动作 \(a_t\) 后,未来能获得的期望总回报 |
整体物理意义:对轨迹上的每个时刻 \(t\)——
\[ \underbrace{\gamma^t}_{\text{时刻}\,t\,\text{的重要性}} \times \underbrace{\nabla_\theta \log \pi_\theta(a_t|s_t)}_{\text{增大}\,a_t\,\text{概率的方向}} \times \underbrace{Q^{\pi_\theta}(s_t, a_t)}_{\text{这个动作有多好}} \]
- 如果 \(Q\) 值大(这个动作带来高回报)→ 沿梯度方向走大步 → 强化这个动作
- 如果 \(Q\) 值小(甚至为负) → 沿反方向走 → 抑制这个动作
- \(\gamma^t\) 有两个作用:(1) 越早的决策权重越大(因为早期决策影响整条轨迹);(2) 让 \(\sum_{t=0}^{\infty}\) 这个理论上的无穷求和收敛——因为 \(\gamma < 1\),所以 \(\gamma^t\) 指数级衰减到零,总和有界。实际应用中回答长度有限(如最多 2048 token),\(\sum\) 自然截断,不需要担心发散
因果性为什么重要? 上一步的公式里,每个时刻的梯度都乘以整条轨迹的总奖励 \(R(\tau)\)。但 \(t=5\) 时刻的动作根本不可能影响 \(t=0 \sim 4\) 时已经发生的奖励,把这些"过去的奖励"也算进去纯粹是噪声。因果性裁剪掉这些无关项,只保留 \(t\) 时刻及之后的累积回报 \(Q^{\pi_\theta}(s_t, a_t) = \mathbb{E}\left[\sum_{k=t}^{\infty} \gamma^{k-t} r_k \mid s_t, a_t\right]\)——方差更小,学习更快。
通过这个技巧,我们将原本难以计算的"概率梯度的积分",转化为了可以通过蒙特卡洛采样(让智能体自己在环境里跑几圈收集数据)来近似计算的"期望值"。
延伸阅读: 关于策略梯度定理的更详细推导和直觉理解,推荐以下两篇经典文章:
- Part 3: Intro to Policy Optimization — OpenAI Spinning Up:OpenAI 官方教程,从最简形式出发逐步引入 baseline 和优势函数。
- Policy Gradient Algorithms — Lil'Log:Lilian Weng 的经典博客,覆盖从 REINFORCE 到 PPO 的完整策略梯度算法族。
梯度的直观理解
我们可以将上式中的 \(Q^{\pi_\theta}(s_t, a_t)\) 替换为优势函数 \(A^{\pi_\theta}(s_t, a_t)\)。 为什么可以这样替换?因为 \(A(s, a) = Q(s, a) - V(s)\),相当于减去了一个只与状态 \(s\) 有关的基线(Baseline) \(V(s)\)。
物理直觉:为什么减去基线不影响期望? 想象一下,你在某个状态 \(s\) 下,对所有可能的动作都加上了一个固定的奖励 \(b(s)\)(比如每个动作都多给 10 分)。因为所有动作的相对好坏没有改变,策略更新的方向也不应该改变。在数学上,由于策略是一个概率分布(所有动作的概率之和永远为 1),如果你试图把所有动作的概率都往上推,这种"整体推力"的总和必然是 0。
我们可以通过下面的推导,严格证明减去任何基线 \(b(s)\) 后的期望梯度为 0。这里的推导关键在于:基线 \(b(s)\) 只与状态有关,在对动作 \(a\) 求和时,它相当于一个常数,可以被直接提取到求和符号外面: \[ \begin{aligned} \mathbb{E}_{a \sim \pi_\theta} \left[ \nabla_\theta \log \pi_\theta(a|s) \cdot b(s) \right] &= \sum_a \pi_\theta(a|s) \left( \nabla_\theta \log \pi_\theta(a|s) \cdot b(s) \right) \\ &= b(s) \sum_a \pi_\theta(a|s) \left( \frac{\nabla_\theta \pi_\theta(a|s)}{\pi_\theta(a|s)} \right) \\ &= b(s) \sum_a \nabla_\theta \pi_\theta(a|s) \\ &= b(s) \nabla_\theta \left( \sum_a \pi_\theta(a|s) \right) \\ &= b(s) \nabla_\theta (1) \\ &= 0 \end{aligned} \] 既然减去 \(V(s)\) 后期望不变,为什么还要减呢?因为这能显著降低采样的方差,让训练更加稳定。
为什么减去基线能降低方差? 想象一下,如果环境给的所有奖励都是非常大的正数(比如所有动作的 \(Q\) 值都在 1000 左右)。那么每次采样,无论动作好坏,梯度都会被乘以一个巨大的正数,导致网络参数剧烈震荡(方差极大)。 当我们减去平均值 \(V(s)\)(假设也是 1000)后,原本的 \(Q(s, a)\) 就变成了优势 \(A(s, a)\),它的值会围绕 0 波动(比如 +5 或 -3)。这样一来,好动作会得到一个温和的正向推动,坏动作会得到一个温和的负向惩罚。梯度的绝对数值大大减小,更新过程自然就变得更加平稳了。
替换后的公式如下: \[ \nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \pi_\theta} \left[ \sum_{t=0}^{\infty} \gamma^t \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot A^{\pi_\theta}(s_t, a_t) \right] \] 这个公式的物理意义非常直观:
- \(\nabla_\theta \log \pi_\theta(a_t|s_t)\) 指示了增加动作 \(a_t\) 概率的参数更新方向。
- \(A^{\pi_\theta}(s_t, a_t)\) 作为权重。如果优势为正,说明该动作好于平均,梯度会推动网络增加该动作的概率;如果优势为负,则降低该动作的概率。
参考资料:
- Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction. MIT press. Chapter 13.
- Part 3: Intro to Policy Optimization — OpenAI Spinning Up
- Policy Gradient Algorithms — Lil'Log